高集成,小尺寸封装:2 x 2 x 0.95 mm LGA
14位数模转化,低噪声 ·
具有标准模式和快速模式,支持I2C和SPI接口
内置self-test
大范围操作电压1.7V-3.6V,与低功耗2~50μA
集成64位FIFO存贮器,符合RoHS标准,无卤素添加
内置运动算法 ,尤其是硬件计步算法
可在-40°C~85°C的温度中工作
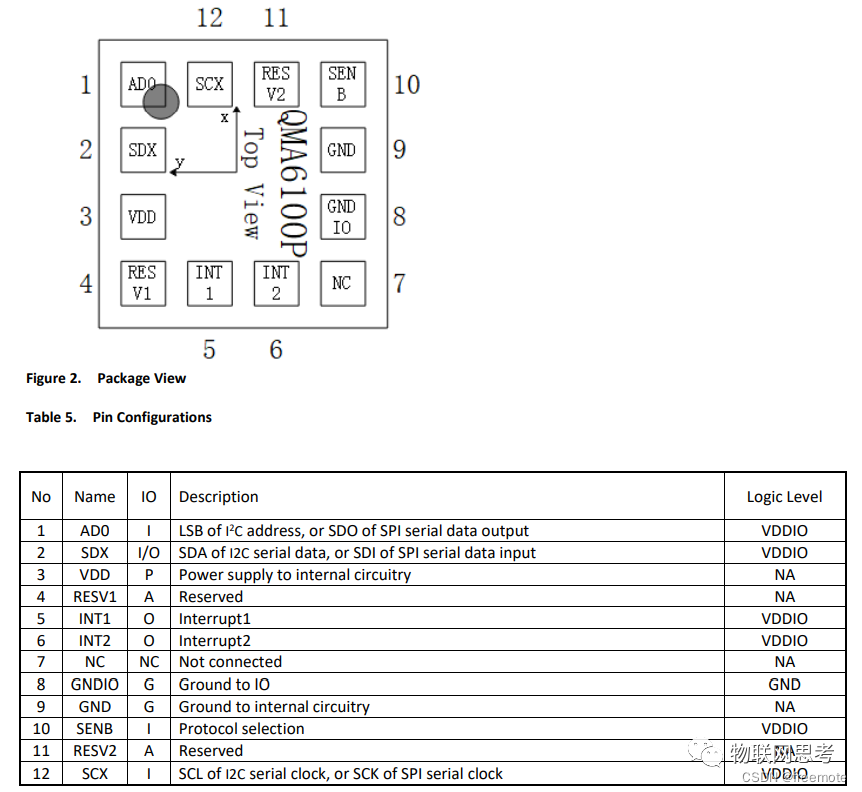
可以看出提供了两个外部中断引脚,支持SPI或I2C通信。


可以通过读这个寄存器判断设备是否存在,默认是0x90。

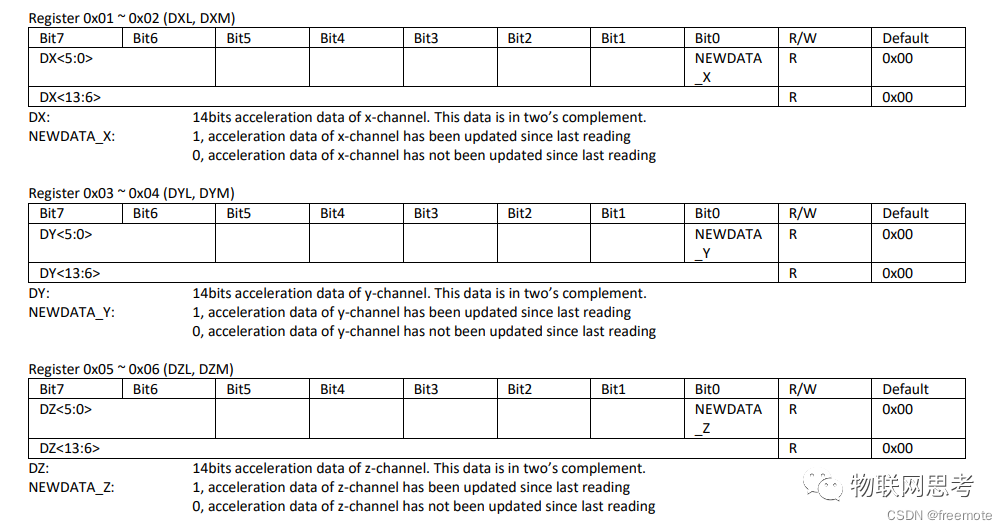
通过这6个寄存器可以读出三轴数据。
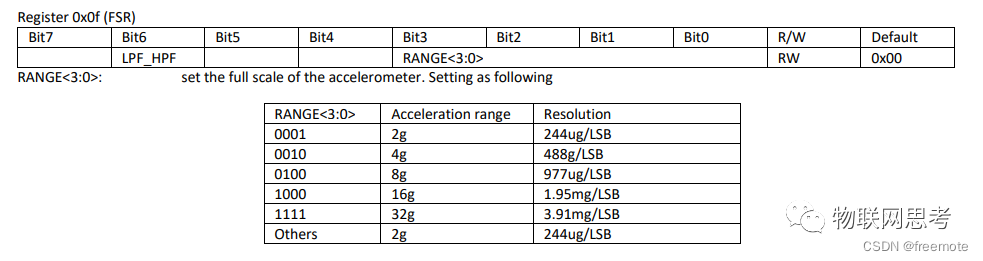
通过这个寄存器设置测量范围。


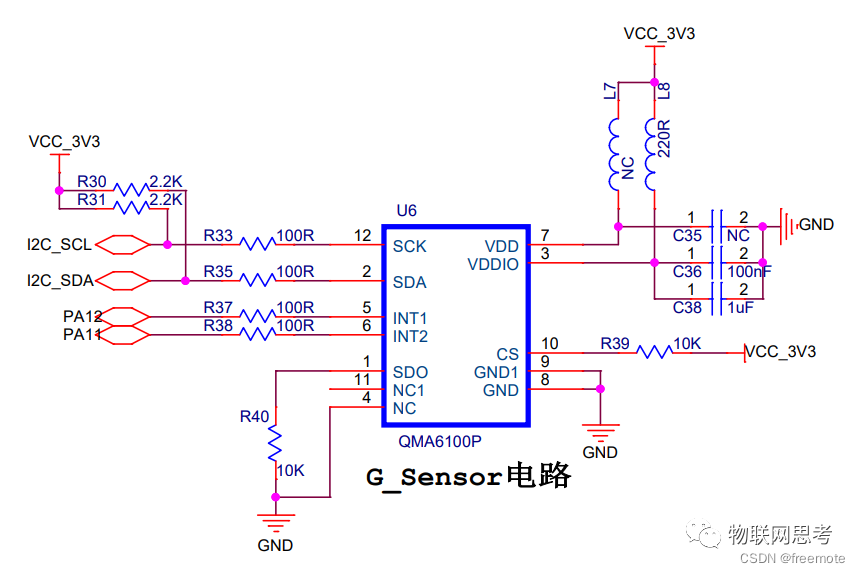
本文使用软硬件I2C与QMA6100P通讯,通过宏切换。
void I2cInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
I2C_InitTypeDef I2C_InitStructure;
RCC_I2CCLKConfig(RCC_I2C1CLK_SYSCLK);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C2, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOF , ENABLE);
GPIO_PinAFConfig(GPIOF, GPIO_PinSource6, GPIO_AF_1);
GPIO_PinAFConfig(GPIOF, GPIO_PinSource7, GPIO_AF_1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOF, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOF, &GPIO_InitStructure);
I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
I2C_InitStructure.I2C_AnalogFilter = I2C_AnalogFilter_Enable;
I2C_InitStructure.I2C_DigitalFilter = 0x00;
I2C_InitStructure.I2C_OwnAddress1 = 0x00;
I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
I2C_InitStructure.I2C_Timing = 0x40B22536;//0x20D22E37;// 0x02105070; //0x40B22536//100k, 0x10950C27; //400kHz
I2C_Init(I2C2, &I2C_InitStructure);
I2C_Init(I2C2, &I2C_InitStructure);
I2C_Cmd(I2C2, ENABLE);
}
void I2cWrite(uint8_t reg,uint8_t var)
{
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_BUSY) != RESET){};
I2C_TransferHandling(I2C2, (SLAVE_ADDR<<1), 1, I2C_Reload_Mode, I2C_Generate_Start_Write);
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_TXIS )==RESET){}; // I2C_FLAG_TXE
I2C_SendData(I2C2, reg);
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_TCR) == RESET){};
I2C_TransferHandling(I2C2, (SLAVE_ADDR<<1), 1, I2C_AutoEnd_Mode, I2C_No_StartStop);
while (I2C_GetFlagStatus(I2C2, I2C_FLAG_TXIS) == RESET){}; //I2C_FLAG_TXIS
I2C_SendData(I2C2, var);
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_STOPF) == RESET){};
}
uint8_t I2cRead(uint8_t reg)
{
uint8_t ret=0;
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_BUSY) != RESET){};
I2C_TransferHandling(I2C2, (SLAVE_ADDR<<1), 1, I2C_SoftEnd_Mode, I2C_Generate_Start_Write);
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_TXIS ) == RESET){}; //I2C_FLAG_TXIS
I2C_SendData(I2C2, reg);
while (I2C_GetFlagStatus(I2C2, I2C_FLAG_TC) == RESET){};
I2C_TransferHandling(I2C2, (SLAVE_ADDR<<1), 1, I2C_AutoEnd_Mode, I2C_Generate_Start_Read);
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_RXNE) == RESET){};
ret = I2C_ReceiveData(I2C2);
while(I2C_GetFlagStatus(I2C2, I2C_FLAG_STOPF) == RESET){};
return ret;
}
#define _SCL_PORT GPIOF
#define _SCL_PIN GPIO_Pin_6
#define _SDA_PORT GPIOF
#define _SDA_PIN GPIO_Pin_7
void _I2cInit(void)
{
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOF , ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOF, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_Init(GPIOF, &GPIO_InitStructure);
}
void _SDA_IN(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOF, &GPIO_InitStructure);
}
void _SDA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
GPIO_Init(GPIOF, &GPIO_InitStructure);
}
void _I2C_Start(void)
{
_SDA_OUT();
GPIO_SetBits(_SDA_PORT,_SDA_PIN); //SDA=1
DelayUs(10);
GPIO_SetBits(_SCL_PORT,_SCL_PIN); //SCL=1
DelayUs(10);
GPIO_ResetBits(_SDA_PORT,_SDA_PIN);//SDA=0
DelayUs(10);
GPIO_ResetBits(_SCL_PORT,_SCL_PIN);//SCL=0
DelayUs(10);
}
void _I2C_Stop(void)
{
_SDA_OUT();
GPIO_ResetBits(_SDA_PORT,_SDA_PIN);//SDA=0
DelayUs(10);
GPIO_SetBits(_SCL_PORT,_SCL_PIN); //SCL=1
DelayUs(10);
GPIO_SetBits(_SDA_PORT,_SDA_PIN); //SDA=1
DelayUs(10);
}
void _I2C_Ack(void)
{
_SDA_OUT();
GPIO_ResetBits(_SDA_PORT,_SDA_PIN);//SDA=0
DelayUs(5);
GPIO_SetBits(_SCL_PORT,_SCL_PIN); //SCL=1
DelayUs(5);
GPIO_ResetBits(_SCL_PORT,_SCL_PIN); //SCL=0
}
void _I2C_NAck(void)
{
GPIO_SetBits(_SDA_PORT,_SDA_PIN); //SDA=1
DelayUs(10);
GPIO_SetBits(_SCL_PORT,_SCL_PIN); //SCL=1
DelayUs(10);
GPIO_ResetBits(_SCL_PORT,_SCL_PIN); //SCL=0
DelayUs(10);
}
uint8_t _I2C_Wait_Ack(void)
{
uint8_t ucErrTime=0<










